
De la inspección 2D a la medición 3D: DEPZ prioriza la disparidad estéreo con aprendizaje automático
En el primer trimestre de 2024, DEPZ decidió enfocarse en la estimación de disparidad estéreo mediante aprendizaje automático. El objetivo es convertir la inspección en medición — permitiendo una evaluación 3D repetible de defectos y desviaciones geométricas en condiciones industriales desafiantes.
Lo que aprendimos de los pilotos iniciales
Durante los pilotos iniciales de visión, una conclusión quedó clara: en muchos casos, no basta con ver un defecto — debemos medirlo contra tolerancias.
Los productos de gran formato pueden presentar:
- Deformación lenta en superficies amplias
- Desviaciones pequeñas pero importantes en bordes y uniones
- Defectos cuya severidad se define por profundidad/altura en lugar de apariencia
Esto condujo naturalmente a DEPZ hacia la visión estéreo y la reconstrucción de profundidad como capacidad central.

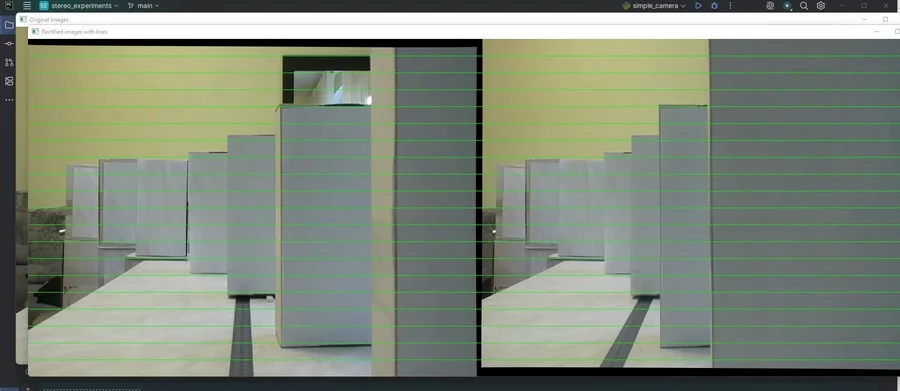
Por qué la disparidad es el cuello de botella técnico
La profundidad desde estéreo comienza con la disparidad: emparejar puntos entre imágenes izquierda y derecha. En demostraciones controladas, muchos métodos funcionan bien. En entornos de producción reales, el problema se vuelve más difícil debido a:
- Superficies de baja textura (plásticos lisos)
- Reflejos y brillos especulares
- Diferencias de iluminación en áreas grandes
- Restricciones de movimiento, vibración y rendimiento
Si la disparidad es inestable, la profundidad se vuelve inestable — y la medición se vuelve poco confiable.
Por qué los enfoques de aprendizaje automático son prometedores
En el T1 2024, DEPZ priorizó la investigación en estimación de disparidad asistida por ML, incluyendo enfoques híbridos que combinan geometría clásica con emparejamiento basado en aprendizaje. Los métodos ML pueden mejorar la robustez mediante:
- Aprender patrones de emparejamiento en superficies de baja textura
- Manejar patrones repetidos y regiones ambiguas de manera más elegante
- Adaptarse a dominios industriales específicos mediante conjuntos de datos seleccionados
- Proporcionar resultados más consistentes en regiones relevantes para decisiones de QA
Lo que realmente estamos construyendo (no solo "un modelo")
El programa de disparidad de DEPZ se trata como una pila de ingeniería completa:
- Pipeline de datos. Recopilación de datos en múltiples estados de superficie y configuraciones de iluminación; escenarios de defectos y geometría representativos de producción; estrategia de etiquetado alineada con resultados medibles.
- Estabilidad de calibración. Procedimientos de calibración y recalibración de cámaras; verificaciones de deriva y estabilidad mecánica a lo largo del tiempo.
- Entorno de evaluación. Pruebas repetibles en objetos de referencia y geometrías conocidas; métricas que reflejan requisitos industriales (repetibilidad, modos de falla, confianza).
- Restricciones de despliegue. Objetivos de rendimiento y latencia; confiabilidad durante ejecuciones prolongadas; comportamiento predecible cuando las condiciones se degradan.
Resultado esperado
El objetivo es crear un núcleo de profundidad que pueda impulsar:
- Inspección y metrología en línea
- Casos de uso de manipulación robótica y automatización
- Futuros dispositivos y software estéreo a nivel de producto
Esta es una inversión fundamental: una vez que la disparidad y la profundidad sean confiables, una gran clase de problemas de automatización se vuelve más fácil y escalable.